Team
For administrative concerns please write to office@mrs.tu-berlin.de.

Wolfgang Hönig
05/2021 - now

Thalia Prokopiou
11/2025 - now

Akmaral Moldagalieva
12/2021 - now

Khaled Wahba
01/2022 - now

Pia Hanfeld
04/2022 - now

Bojan Derajić
12/2023 - now

Omar Elsayed
02/2025 - now

Christoph Scherer
02/2025 - now

Charlotte Stentzler
08/2025 - now

Johannes Roser
12/2025 - now
Lab

Flightspace
02/2024 - now
Indoor flight space (7.5 x 4 x 2.75 m) with safety nets and padding all around with two external tracking systems for ground truth (motion capture and LightHouse).
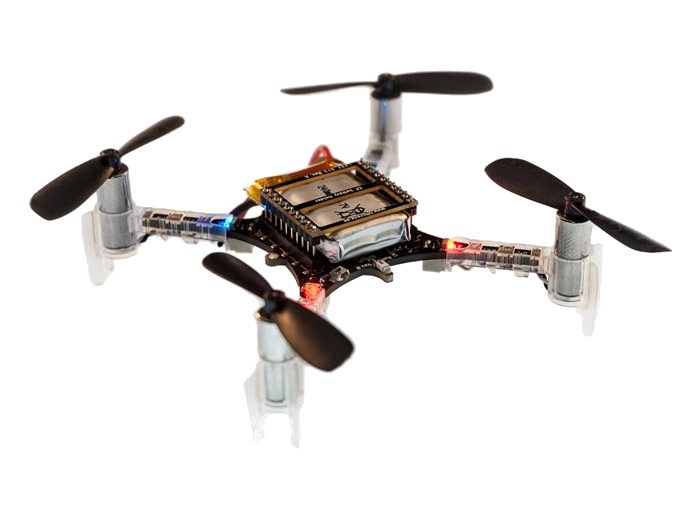
Crazyflie 2.1
2021 - now
Small (9 cm rotor-to-rotor) and lightweight (29 g) robots with off-the-shelf hardware and fully open-source software. We develop the the ROS2 driver for these robots, called Crazyswarm2.
Thesis Supervision
Mathieu Siegenthaler
05/2025 - now
Kinodynamic Multi-Robot Traveling Salesman Problems with Applications to Ocean Cleanup
Alumni
- Issa-Noel Yamamura, 01/2026 - 01/2026 ,
-
Nan Cai,
06/2023 - 09/2025 ,
[ ] -
Jiaming Li,
07/2025 - 01/2026 ,
[ ] - Hendrik Berg, 03/2025 - 09/2025 , , Motion Planning and Control for Fully Submerged Hydrofoil Vessels
-
Dennis Schmidt,
12/2022 - 05/2024, 11/2024 - 03/2025 ,
[ ] - Viktor Lorentz, 01/2025 - 07/2025 , , Reinforcement Learning for Collaborative Transport of Cable Suspended Payloads with Multiple Multirotors
- Max Klemens, 12/2024 - 06/2025 , , Learning Multirotor Vision-to-Action Control Policies via Imitation Learning
- Leon Thormeyer, 11/2024 - 06/2025 , , Decentralized Control Policy with Imitation Learning for Multiple Multirotors Transporting Cable Suspended Payloads
- Tobias Jung, 08/2024 - 01/2025 , , Software-in-the-loop Simulation for Crazyflie Multirotor Teams
-
Ilaria Cicchetti-Nilsson,
05/2021 - 10/2024 ,
[ ] - Christoph Scherer, 02/2024 - 09/2024 , , Learning Residual Physics Distributions of Multirotors with Cable-Suspended Payloads
-
Achim von Prittwitz,
08/2024 - 02/2025 ,
[ ] -
Leon Thormeyer,
08/2024 - 02/2025 ,
[ ] - Natalie Huang, 06/2024 - 08/2024 ,
- Dennis Schmidt, 06/2024 - 01/2025 , , Development of an uncertainty-aware Motion Planner combining Branch MPC with Machine Learning
- Eckart Ferdinand Cobo Briesewitz, 05/2024 - 10/2024 , , Learning-based Multirotor Control Enhancements
- Julius Franke, 05/2024 - 11/2024 , , Motion Primitive Selection for Kinodynamic Motion Planning
-
Jan Achermann,
06/2024 - 02/2025 ,
[ ] -
Max Perschen,
06/2024 - 10/2024 ,
[ ] - Flightspace, 08/2021 - 01/2024 , , Small indoor flight space (3.5 x 3.5 x 2.75 m) with safety nets and padding all around with two external tracking systems for ground truth (motion capture and LightHouse).
- Christian Hickstein, 11/2023 - 03/2024 , , Hardware-in-the-loop Simulation for Crazyflie Multirotors
-
Julien Thévenoz,
11/2023 - 06/2024 ,
[ ] -
Keerthana Laxmish,
04/2023 - 10/2023 ,
, Learning-Based Relative State Estimation for Ultralow-Power Multirotor Teams
[ ] - Theo Valentin Kern, 05/2023 - 11/2023 , , Long-Horizon Planning of Multirotor Teams for Construction Assembly
-
Alexander Weingart,
02/2023 - 08/2023 ,
, Enhancing Sampling Based Kinodynamic Motion Planning with Reinforcement Learning Policies
[ ] - Maika Krüger, 01/2023 - 08/2023 , , Safety-Guided Multi-Robot Motion Planning with Applications to Robotic Assisted Surgery using Monte-Carlo Tree Search
-
Jana Schicke,
11/2022 - 03/2023 ,
, Learning-based Multirotor System Model Enhancements
[ ] -
Pablo Robles Cervantes,
11/2022 - 3/2023 ,
[ ] -
Welf Rehberg,
04/2022 - 11/2022 ,
, K-Order Markov Optimization and Sequential Convex Programming for Multirotor Motion Planning
[ ]