Publications
This list only includes publications since the lab was founded. For other relevant publications see Wolfgang Hönig's personal webpage.
For BS/MS/PhD theses, please check the alumni page.
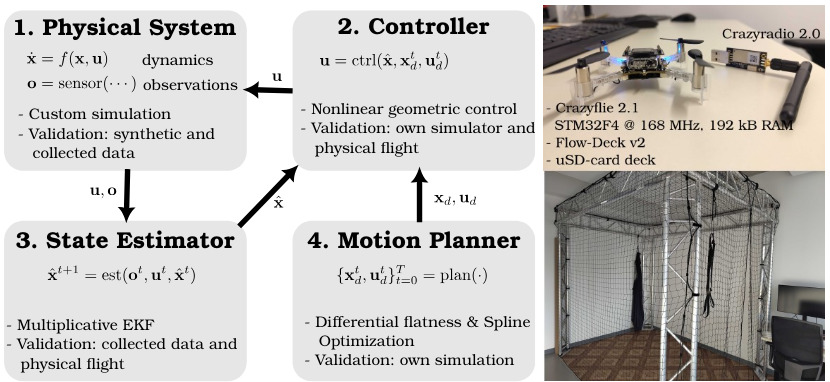
Rusty Flying Robots: Learning a Full Robotics Stack with Real-Time Operation on an STM32 Microcontroller in a 9 ECTS MS Course
Robotics in Education (RiE), 2026
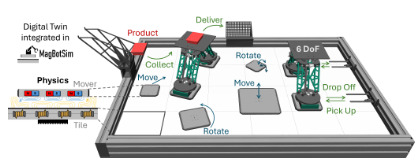
From Transportation to Manipulation: Transforming Magnetic Levitation to Magnetic Robotics
2nd German Robotics Conference (no peer review), 2026
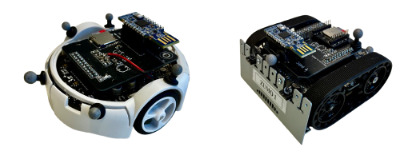
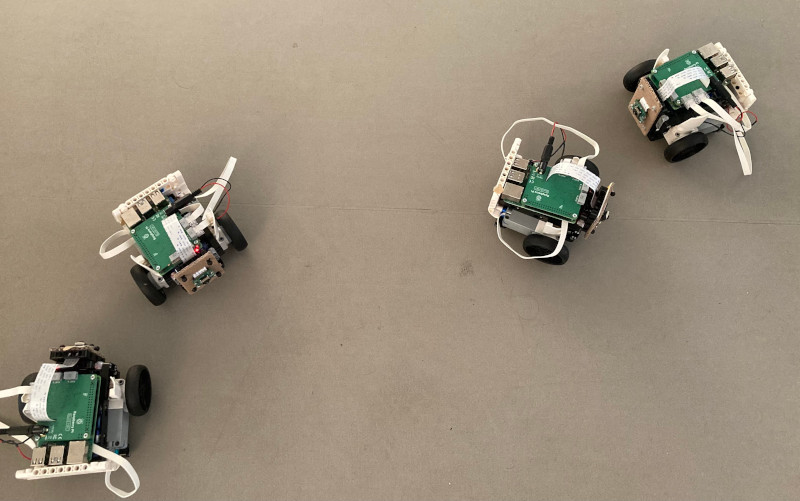
Pololu-rs: A Rust-Based Framework for Reproducible Multi-Robot Experiments
2nd German Robotics Conference (no peer review), 2026
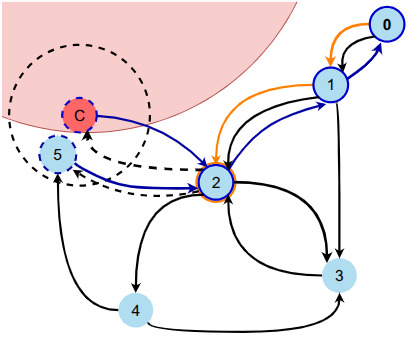
ANN-CMCGS: Generalizing Continuous Monte-Carlo Graph Search with Approximate Nearest Neighbors
2nd German Robotics Conference (no peer review; work accepted as extended abstract at AAMAS), 2026
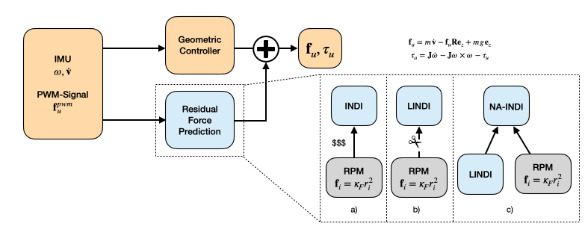
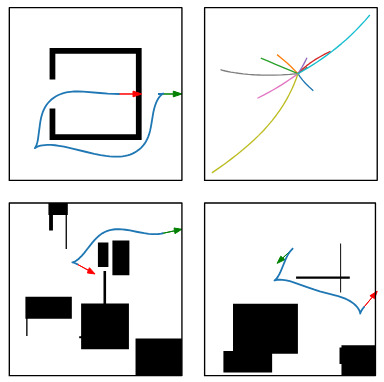
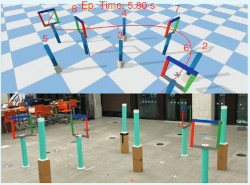
Learned Incremental Nonlinear Dynamic Inversion for Quadrotors with and without Slung Payloads
2nd German Robotics Conference (no peer review; work accepted at L4DC), 2026
ANN-CMCGS: Generalizing Continuous Monte-Carlo Graph Search with Approximate Nearest Neighbors
International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2026
How to Model Your Crazyflie Brushless
IEEE International Conference on Robotics and Automation (ICRA), 2026
GRACE: A Unified 2D Multi-Robot Path Planning Simulator & Benchmark for Grid, Roadmap, And Continuous Environments
IEEE International Conference on Robotics and Automation (ICRA), 2026
ORN-CBF: Learning Observation-conditioned Residual Neural Control Barrier Functions via Hypernetworks
IEEE International Conference on Robotics and Automation (ICRA), 2026
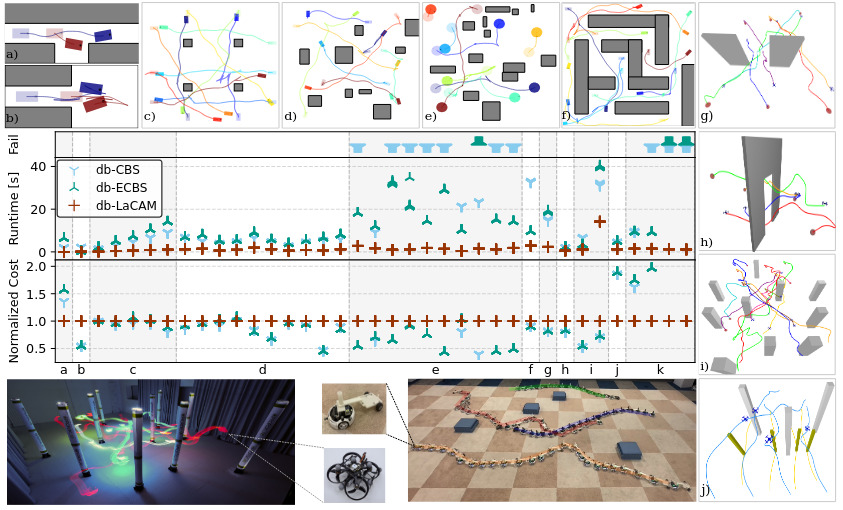
db-LaCAM: Fast and Scalable Multi-Robot Kinodynamic Motion Planning with Discontinuity-Bounded Search and Lightweight MAPF
International Conference on Automated Planning and Scheduling (ICAPS), 2026
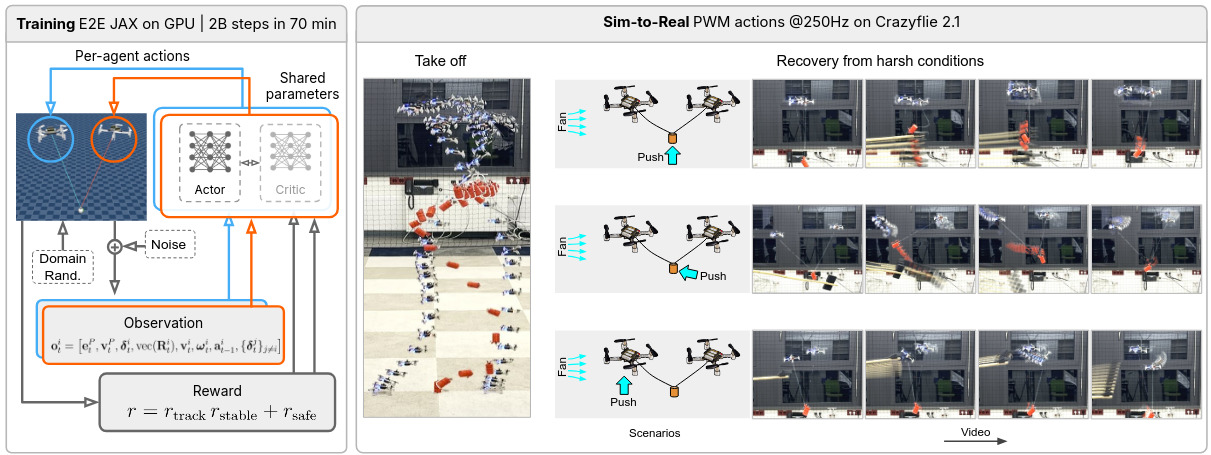
CrazyMARL: Decentralized Direct Motor Control Policies for Cooperative Aerial Transport of Cable-Suspended Payloads
IEEE International Conference on Robotics and Automation (ICRA), 2026
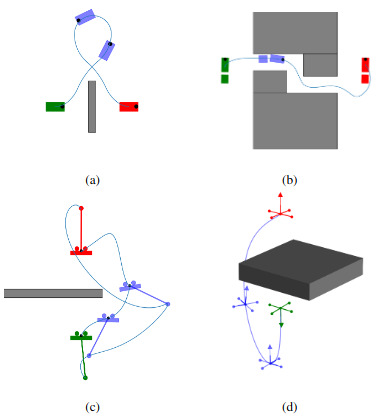
pc-dbCBS: Kinodynamic Motion Planning of Physically-Coupled Robot Teams
IEEE Robotics and Automation Letters (R-AL), 2025
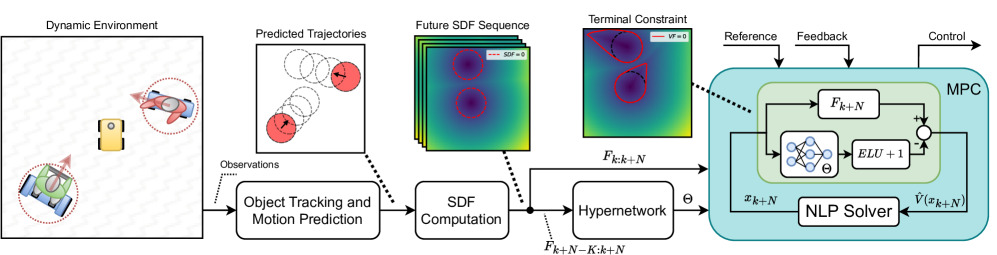
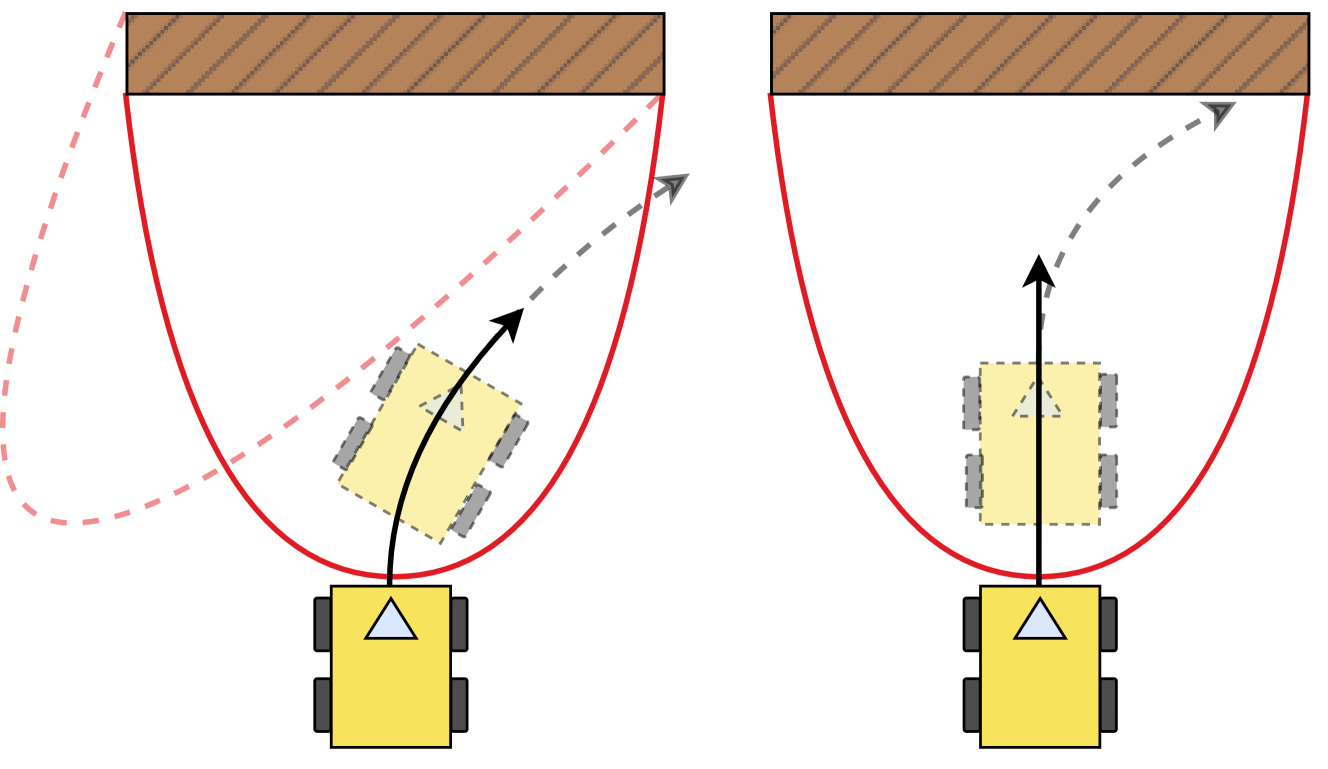
Residual Neural Terminal Constraint for MPC-based Collision Avoidance in Dynamic Environments
Conference on Robot Learning (CoRL), 2025
Learning Maximal Safe Sets Using Hypernetworks for MPC-Based Local Trajectory Planning in Unknown Environments
IEEE Robotics and Automation Letters (R-AL), 2025
db-ECBS: Interaction-Aware Multi-Robot Kinodynamic Motion Planning
IEEE Transactions on Robotics (T-RO), 2025
Optimal Assignment for Multi-Robot Tracking Using Motion Capture Systems
1st German Robotics Conference (no peer review), 2025
db-ECBS: Interaction-Aware Multi-Robot Kinodynamic Motion Planning (Extended Abstract)
1st German Robotics Conference (no peer review), 2025
Pc-dbCBS: Kinodynamic Motion Planning of Physically-Coupled Robot Teams
1st German Robotics Conference (no peer review), 2025
Accelerating db-A* for Kinodynamic Motion Planning Using Diffusion
Under Review, 2025
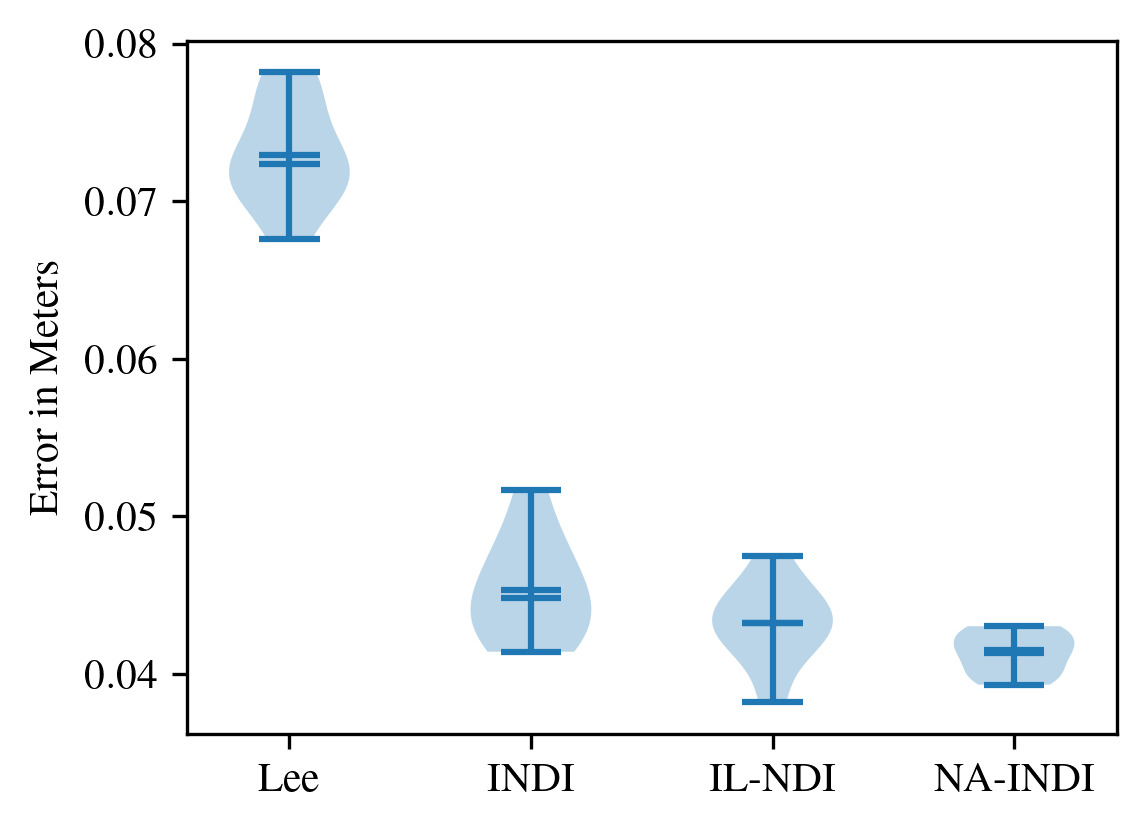
Neural-Augmented Incremental Nonlinear Dynamic Inversion for Quadrotors with Payload Adaptation
Learning for Dynamics and Controls (L4DC), 2026
Advancing Reproducibility, Benchmarks, and Education With Remote Sim2real: Remote Simulation to Real Robot Hardware
IEEE Robotics & Automation Magazine, 2025
Automatic Gain Tuning for Multirotors Using Differentiable Optimization
CoRL Workshop on Differentiable Optimization Everywhere: Simulation, Estimation, Learning, and Control, 2024
GSRM: Building Roadmaps for Query-Efficient and Near-Optimal Path Planning Using a Reaction Diffusion System
IEEE/RSJ international conference on intelligent robots and systems (IROS), 2024
iDb-RRT: Sampling-based Kinodynamic Motion Planning with Motion Primitives and Trajectory Optimization
IEEE/RSJ international conference on intelligent robots and systems (IROS), 2024
db-CBS: Discontinuity-Bounded Conflict-Based Search for Multi-Robot Kinodynamic Motion Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
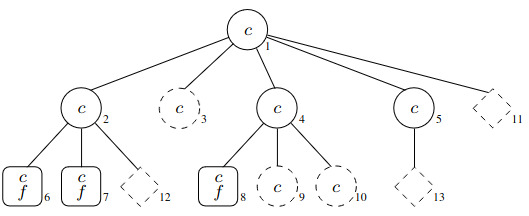
Effort Level Search in Infinite Completion Trees with Application to Task-and-Motion Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
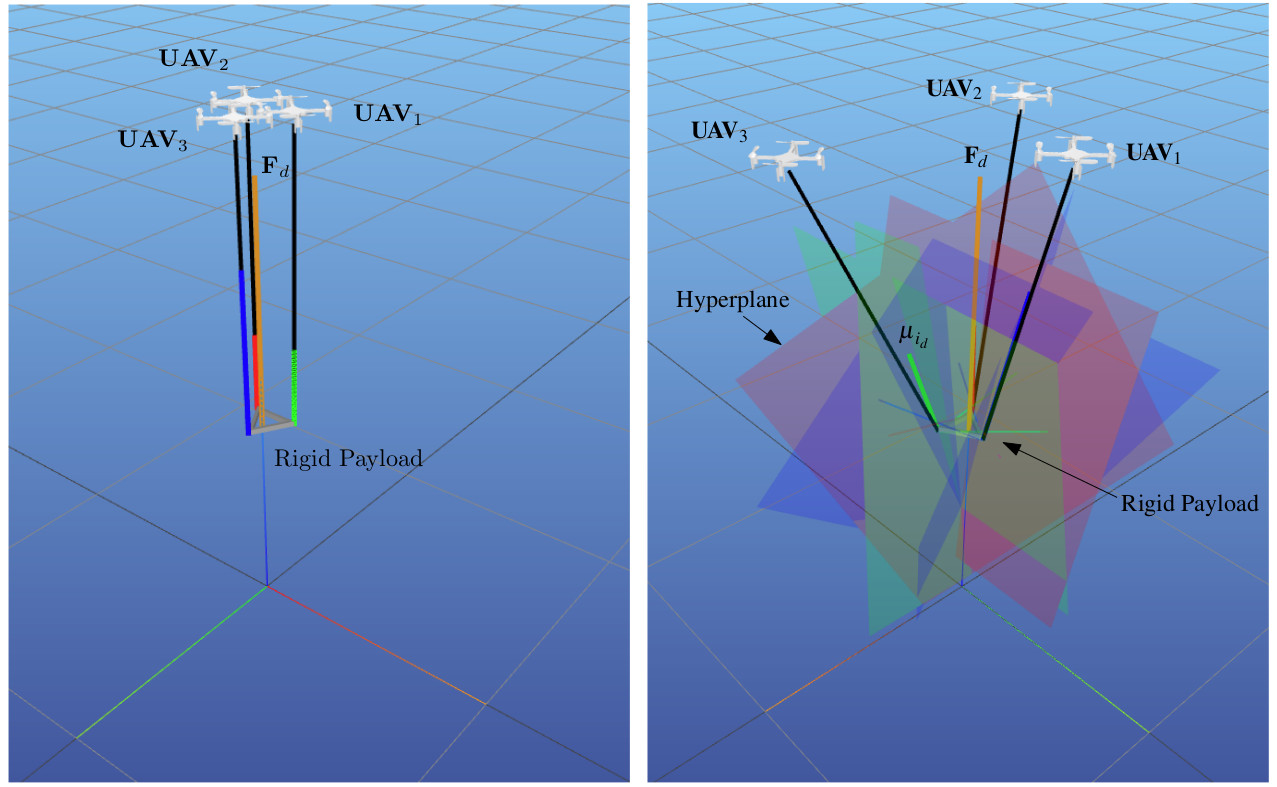
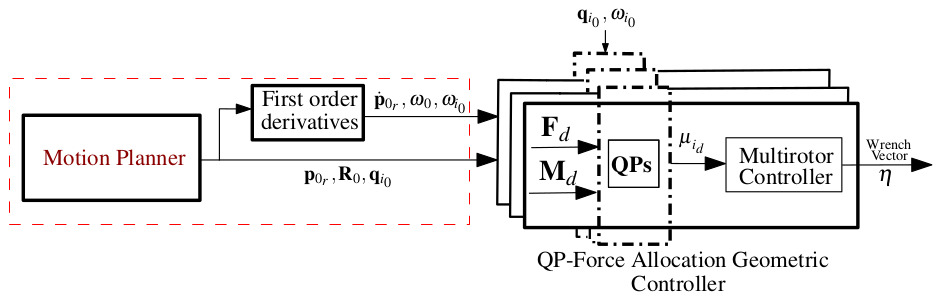
Efficient Optimization-based Cable Force Allocation for Geometric Control of Multiple Quadrotors Transporting a Payload
IEEE Robotics and Automation Letters (RA-L); presentation at IROS, 2024
Model AI Assignment: Collective Intelligence from a Synthetic and Biological Perspective
Symposium on Educational Advances in Artificial Intelligence (EAAI), 2024
iDb-A*: Iterative Search and Optimization for Optimal Kinodynamic Motion Planning
IEEE Transactions on Robotics (T-RO), 2025
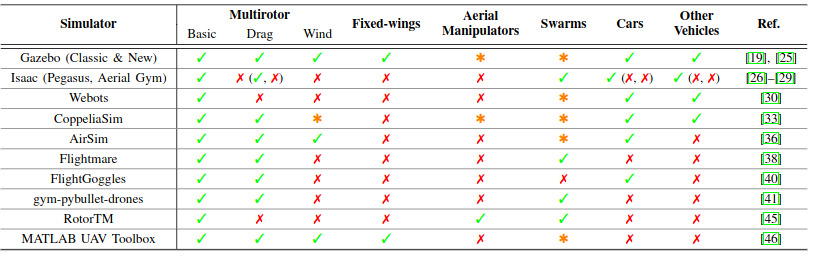
Survey of Simulators for Aerial Robots
IEEE Robotics & Automation Magazine, 2023
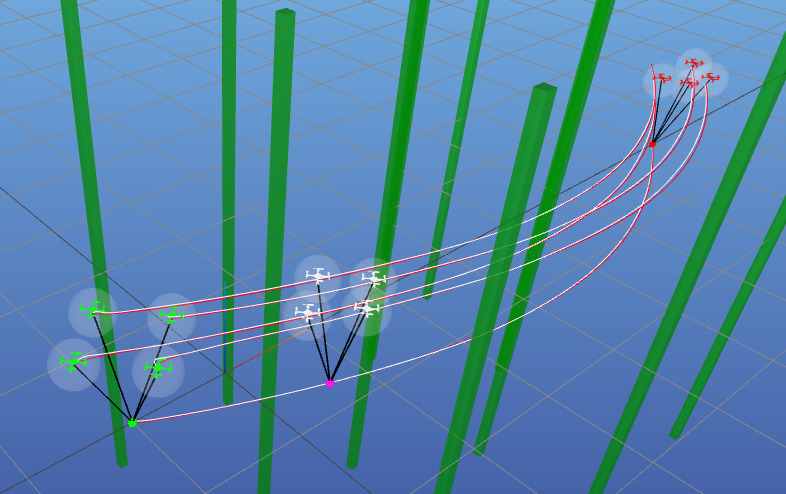
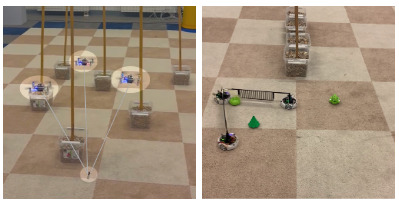
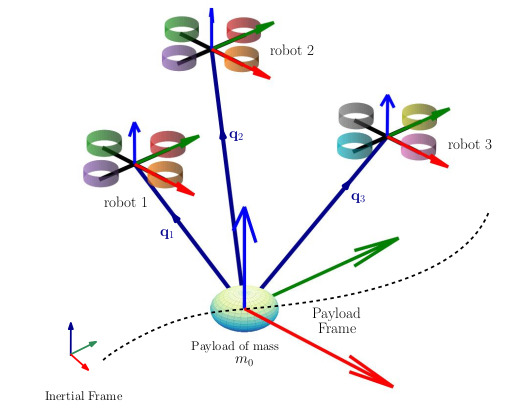
Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments
IEEE/RSJ international conference on intelligent robots and systems (IROS), 2024
MRNAV: Multi-Robot Aware Planning and Control Stack for Collision and Deadlock-free Navigation in Cluttered Environments
arXiv, 2023

Kidnapping Deep Learning-based Multirotors using Optimized Flying Adversarial Patches
International Symposium on Multi-Robot and Multi-Agent Systems (MRS), 2023
RLSS: real-time, decentralized, cooperative, networkless multi-robot trajectory planning using linear spatial separations
Autonomous Robots (AuRo), Special Issue "Robot Swarms in the Real World: from Design to Deployment", 2023
Motion Planning for Cable-Suspended Payload Transportation with a Team of Multirotors in Cluttered Environments
Future of Construction Workshop at ICRA, 2023
Best Research Award at the workshop

Flying Adversarial Patches: Manipulating the Behavior of Deep Learning-based Autonomous Multirotors
Multi-Robot Learning Workshop at ICRA, 2023
Comparison of Optimization-Based Methods for Energy-Optimal Quadrotor Motion Planning
Energy Efficient Aerial Robotic Systems Workshop at ICRA, 2023
Virtual Omnidirectional Perception for Downwash Prediction within a Team of Nano Multirotors Flying in Close Proximity
International Symposium on Multi-Robot and Multi-Agent Systems (MRS), 2023
Distributed Geometric and Optimization-based Control of Multiple Quadrotors for Cable-Suspended Payload Transport
Decision Making in Multi-Agent Systems Workshop at IROS, 2022
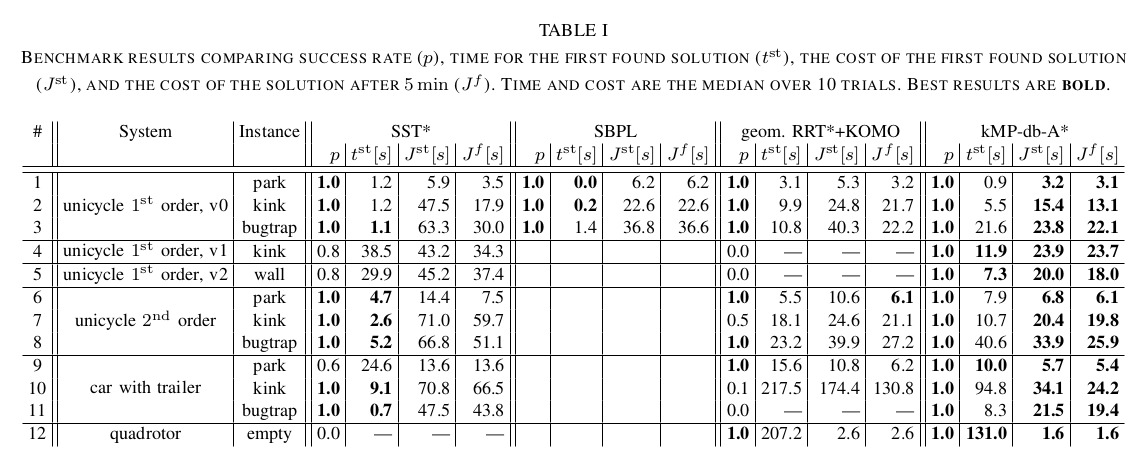
Benchmarking Sampling-, Search-, and Optimization-based Approaches for Time-Optimal Kinodynamic Mobile Robot Motion Planning
Evaluating Motion Planning Performance: Metrics, Tools, Datasets, and Experimental Design Workshop at IROS, 2022

Sequence-of-Constraints MPC: Reactive Timing-Optimal Control of Sequential Manipulation
IEEE/RSJ international conference on intelligent robots and systems (IROS), 2022
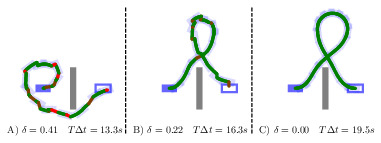
db-A*: Discontinuity-bounded Search for Kinodynamic Mobile Robot Motion Planning
IEEE/RSJ international conference on intelligent robots and systems (IROS), 2022
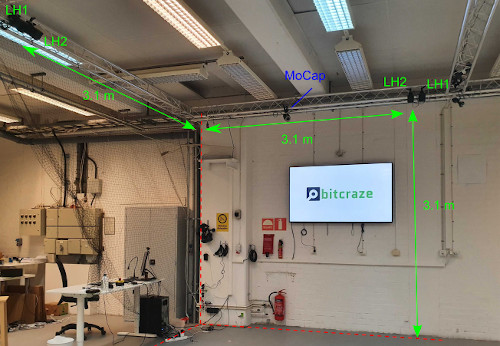
Lighthouse Positioning System: Dataset, Accuracy, and Precision for UAV Research
Robot Swarms in the Real World Workshop at ICRA, 2021