6 Car With Trailer
6.1 Dynamics
- Parameters
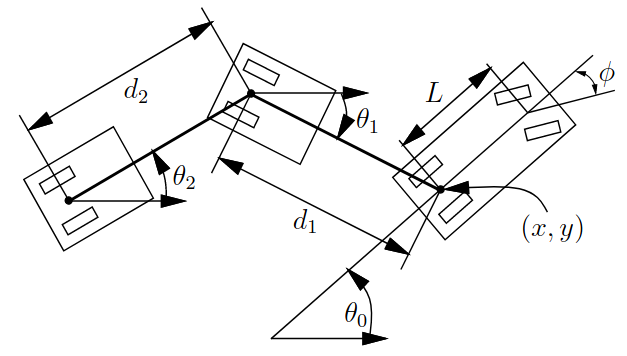
- \(L\): distance between the wheels [m]
- \(d_1\): distance between car and trailer [m]
- state space \(\mathcal{X}\)
- action space \(\mathcal{U}\)
- State: \(\mathbf{x}= \begin{pmatrix}x, y, \theta_0, \theta_1 \end{pmatrix}^\top \in \mathcal{X}\)
- position \((x, y)^\top\) [m]
- orientation of the car \(\theta_0\) [rad]
- relative orientation of the trailer \(\theta_1\) [rad]
- Action: \(\mathbf{u}= \begin{pmatrix} v, \phi \end{pmatrix}^\top \in \mathcal{U}\)
- speed \(v\) [m/s]
- front wheel angle \(\phi\) [rad]
- Dynamics: \[ \begin{aligned} \dot x &= v \cos \theta_0\\ \dot y &= v \sin \theta_0\\ \dot \theta_0 &= \frac{v}{L} \tan \phi\\ \dot \theta_1 &= \frac{v}{d_1} \sin{(\theta_0 - \theta_1)} \end{aligned} \]
Note
This is generalized in LaValle (2006, Eq. (13.19)) to more than 1 trailer.
6.2 Differential Flatness
6.3 Invariance
The dynamics are translation-invariant.
6.4 Controllers
6.5 Useful Parameters
6.5.1 car1_with_1trailer_v0
A basic version proposed at (Hönig et al. (2022); Ortiz-Haro et al. (2024)) \[ \begin{aligned} L &= 0.25 m\\ d_1 &= 0.5 m\\ \mathcal{U}&= [-0.1, 0.5] m/s \times [-\pi/3, \pi/3] rad\\ \pi/4 &> | \angle (\theta_0, \theta_1) | \end{aligned} \]
Note
The last constraint limits the state space \(\mathcal{X}\).