Flying Robots
Programming for Robots: Software-in-the-Loop (SITL), Rust
Oct 17, 2025
Software-in-the-loop (SITL or SIL)
Concept
Software-in-the-loop: Execute at least some part of the software that would run on the robot for simulation or validation.
Hardware-in-the-loop: Execute at least some part of the software on the robot for simulation or validation.
Typical Example: PX4
Typical Example: Crazyflie
- Crazyflie uses FreeRTOS, not Posix-compliant
- Parts of the firmware can be compiled as library, with Python bindings
- Testing/simulation can be done using Python
Useful principle outside SIL: High-speed implementation in C/C++ and ease-of-use through Python bindings is typical for modern projects (e.g., PyTorch, numpy).
Advantages / Disadvantages
- Simulation-driven development
- Much easier debugging / logging
- Can test implementations that would be too inefficient on the real hardware
- Code tends to be cleaner (HAL abstraction)
- Timing (or other hardware-related) issues cannot be found
- Workflow overhead (especially for mix of programming languages)
Programming Language Rust
History
- 2006: Toy project at Mozilla research
- 2009: Official work at Mozilla (10 engineers)
- 2015: first stable release
- 2021: Rust foundation formed (AWS, Huawei, Google, Microsoft, and Mozilla)
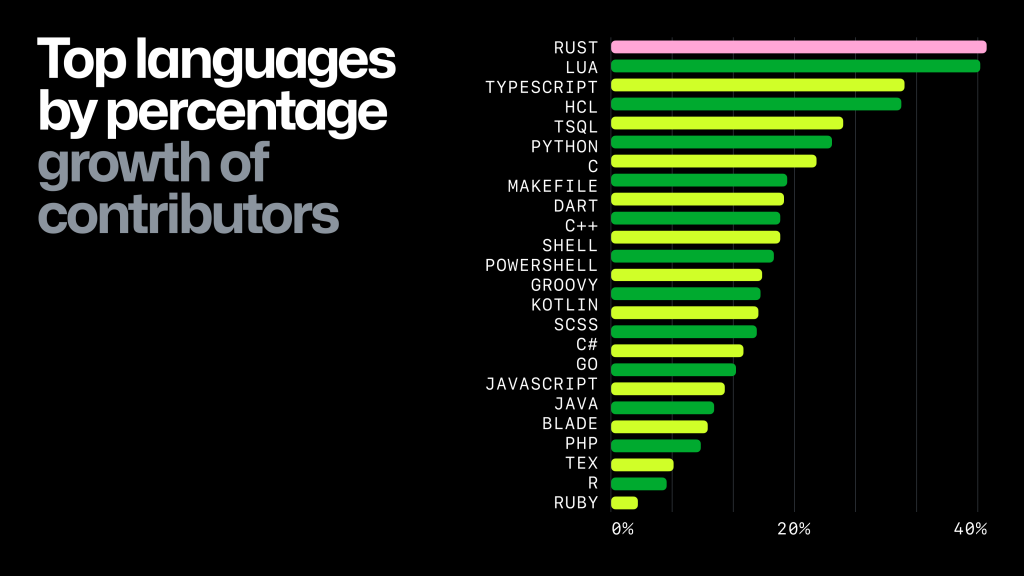
Current Usage (According to Github 2023)
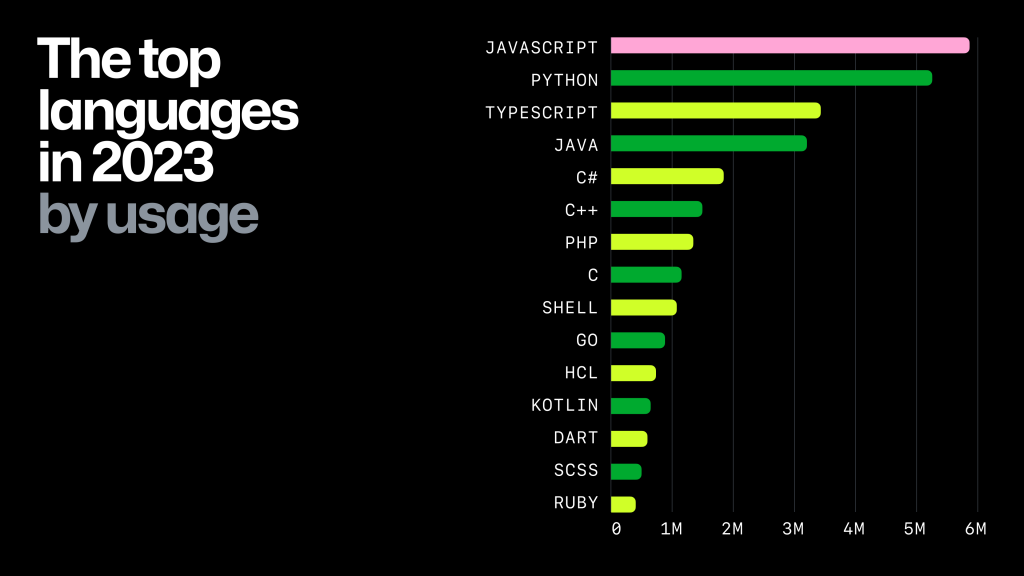
Current Usage (According to Github 2023)
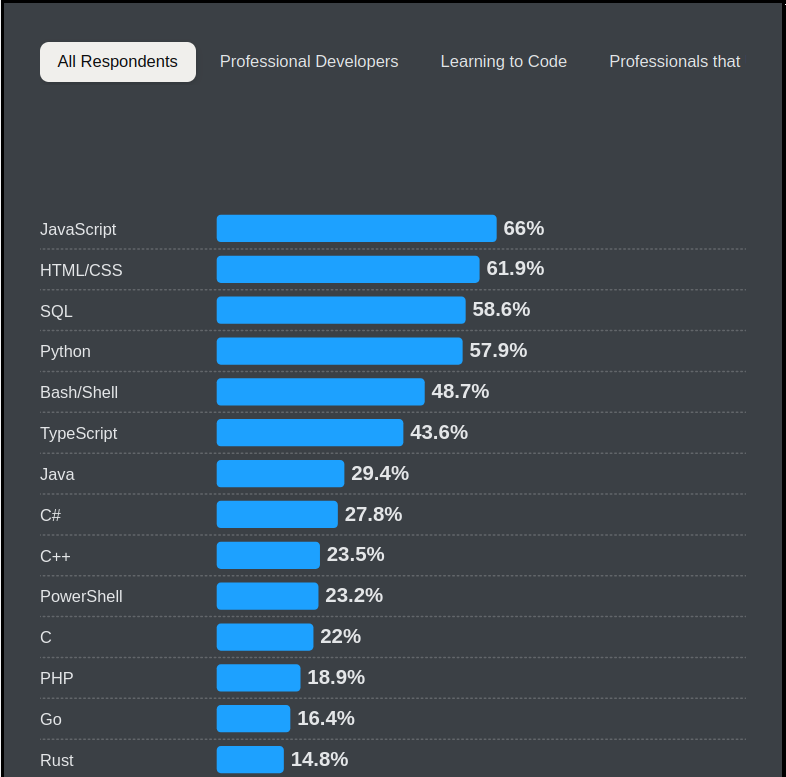
Current Usage (According to Stack Overflow 2025)
Current Admiration (According to Stack Overflow 2025)
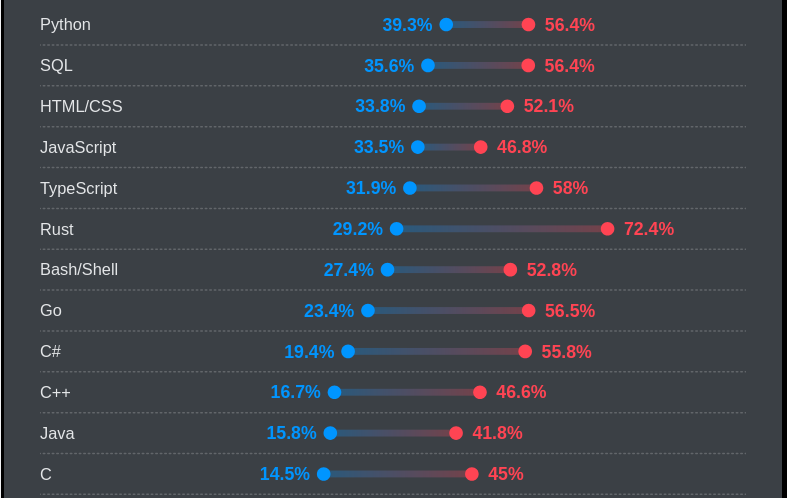
Source, Blue=Admired, Red=Desired
Use Cases
Professional Usage
- Firefox Browser
- Datacenter backend (Cisco, AWS)
- Linux drivers (since 2023)
- Rust Case Study (Fulton et al. 2021)
Academia
- Why Scientists Are Turning to Rust (Perkel 2020)
Core Concepts
- Syntax similar to C/C++
- Compiled, strongly typed
- No garbage collection
- Compile-time checks for memory safety (Borrow-checker)
- Integrated build system and package manager
Learning Resources
I used the book.
Comparison to Other Languages
- Python
- Compiled (instead of interpreted), strongly typed (rather than scripting language), harder to use, fewer packages/libraries
- C
- More features (some of which are not embedded friendly), memory safety guarantees
- C++
- better module system (integrated package manager), fewer features, fewer packages/libraries
Interoperability (e.g., calling Rust from C/C++ and vice versa) possible
Why Rust in this Course?
- Robots are safety-critical and should use a (memory-)safe language.
- US government does not recommend using C/C++ for new projects.(House 2024)
- For SITL, we can use a single language (no prototype in Python)
- Very difficult to peer review C++ code (memory issues hard to spot)
- Students know Python well, but C(++) poorly
- Experiment: can Rust replace the typical C++/Python combination in research?
Simulating Physics
A Typical Simulator
- In the simplest case we have
computeObservation(x)=xrobotBehavior(...)=fixed value
integrateDynamics(x, u, delta_t)initial value problem (ODE solver!)
Euler Integration
\[ \mathbf{x}_{t+\Delta t} = \mathbf{x}_t + f(\mathbf{x}_t, \mathbf{u}_t) \cdot \Delta t \]
- Simple
- efficient
- Inaccurate for large \(\Delta t\)
Classic Runge–Kutta Method (RK4)
\[ \begin{align} \mathbf{x}_{t+\Delta t} &= \mathbf{x}_t + \frac{\Delta t}{6} (k_1 + 2 k_2 + 2 k_3 + k_4)\\ k_1 &= f(\mathbf{x}_t, \mathbf{u}_t)\\ k_2 &= f(\mathbf{x}_t + \Delta t \frac{k_1}{2}, \mathbf{u}_t)\\ k_3 &= f(\mathbf{x}_t + \Delta t \frac{k_2}{2}, \mathbf{u}_t)\\ k_4 &= f(\mathbf{x}_t + \Delta t k_3, \mathbf{u}_t) \end{align} \]
More function evaluations of \(f\) needed
More accurate (allows larger \(\Delta t\))
Building a 1D Multirotor Simulator
Setting Up Rust
Physics
struct Multirotor1dState {
z: f32,
z_dot: f32,
}
struct Multirotor1dAction {
f1: f32,
}
struct Multirotor1d {
mass: f32,
g: f32,
dt: f32,
x: Multirotor1dState,
}
impl Multirotor1d {
fn step(&mut self, action: Multirotor1dAction) {
let z_new = self.x.z + self.x.z_dot * self.dt;
let z_dot_new = self.x.z_dot + ((action.f1 / self.mass) - self.g) * self.dt;
self.x.z = z_new;
self.x.z_dot = z_dot_new;
}
}Physics Demo
(Demo the code)
Visualization
Meshcat
- Server runs in the browser (using three.js)
- Client available for Python, C++ (as part of Drake), and Rust
(Small demo of meshcat Rust)
1D Multirotor Demo
(Demo the provided example code)
Conclusion
Learned Today
- Types and use cases of flying robots
- Dynamics of multirotors (1D and 2D)
- How to build a simple simulator in Rust
Assignment 0: Build a 2D Multirotor Simulator
- Good way to learn Rust and see if you like the course.
- Next week
- Discussion/presentation of your solutions
- Full 3D Multirotor dynamics and assignment 1
References
Questions
?