Flying Robots
Multirotor Flight Dynamics
Oct 24, 2025
Motors and Propellers
Brushed Motor
- Simple design
- Cheap
- Easy to control (e.g., pulse-width-modulation (PWM))

Brushless Motor
- More energy efficient
- More durable
- Controlled using an electronic speed controller (ESC)
- We typically control the angular velocity of a motor \(\omega_i\) (in rpm)
Frame
- Motors are rigidly attached to a frame
- Common: X-configuration or +-configuration (here: X)
- Why do the motors spin in different directions?
- Why do helicopters use two propellers?
Allocation Matrix Example Plus-Configuration
\[ \begin{align} \boldsymbol{\eta}= \begin{bmatrix}f\\\tau_x\\\tau_y\\\tau_z\end{bmatrix} = \begin{bmatrix} \kappa_F & \kappa_F & \kappa_F & \kappa_F\\ 0 & \kappa_F l & 0 & -\kappa_F l\\ -\kappa_F l & 0 & \kappa_F l & 0\\ \kappa_\tau & -\kappa_\tau & \kappa_\tau & -\kappa_\tau \end{bmatrix} \begin{bmatrix} \omega_1^2\\ \omega_2^2\\ \omega_3^2\\ \omega_4^2 \end{bmatrix} \end{align} \]
- \(l\): distance from the axis of rotation of the rotors to the center of the quadrotor
(From the seminal paper (Mellinger and Kumar 2011))
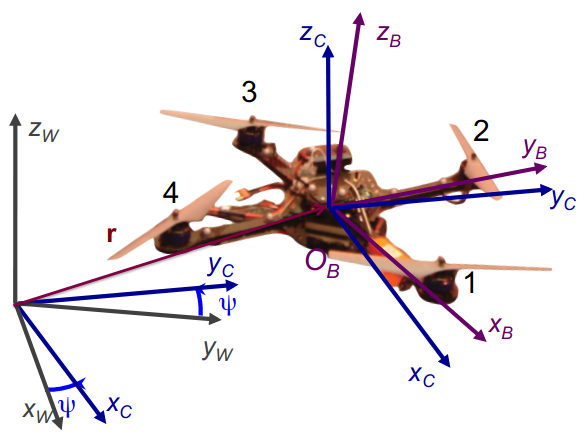
Reference Frame Crazyflie
Allocation Matrix Crazyflie
\[ \begin{align} \boldsymbol{\eta}= \begin{bmatrix}f\\\tau_x\\\tau_y\\\tau_z\end{bmatrix} = \begin{bmatrix} \kappa_F & \kappa_F & \kappa_F & \kappa_F\\ -\kappa_F a & -\kappa_F a & \kappa_F a & \kappa_F a\\ -\kappa_F a & \kappa_F a & \kappa_F a & -\kappa_F a\\ -\kappa_\tau & \kappa_\tau & -\kappa_\tau & \kappa_\tau \end{bmatrix} \begin{bmatrix} \omega_1^2\\ \omega_2^2\\ \omega_3^2\\ \omega_4^2 \end{bmatrix} \end{align} \]
- \(a=\frac{l}{\sqrt{2}}\)
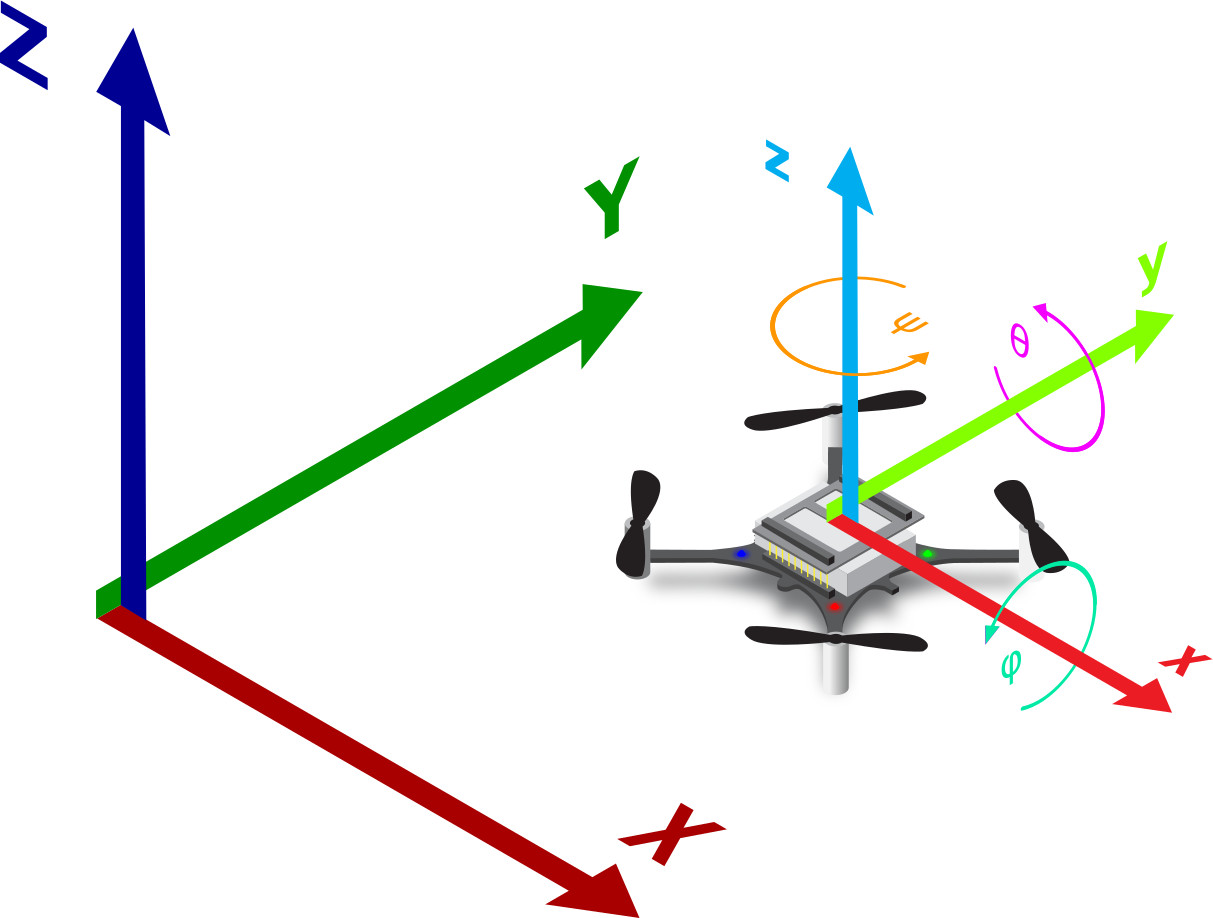
Flight Dynamics
- State: \(\mathbf{x}= (\mathbf{p}, \mathbf{v}, \mathbf{R}, \boldsymbol{\omega})^\top \in \mathbb R^3 \times \mathbb R^3 \times SO(3) \times \mathbb R^3\)
- Position \(\mathbf{p}= (x,y,z)^\top\) [m, global frame]
- Velocity \(\mathbf{v}= (\dot x, \dot y, \dot z)^\top\) [m/s, global frame]
- Orientation \(\mathbf{R}\) [attitude rotation matrix]
- Angular velocity \(\boldsymbol{\omega}= (\omega_x, \omega_y, \omega_z)^\top\) [rad/s, body frame]
- Action: \(\mathbf{u}= (\omega_1, \omega_2, \omega_3, \omega_4) \in \mathbb R^4\) [rpm or rad/s]
- Parameters
- Mass \(m\) [kg], Arm length \(l\) [m], inertia matrix \(\mathbf J\) [\(kg\cdot m^2\)], Gravity \(g\) [\(m/s^2\)]
Flight Dynamics
- Dynamics: \[ \begin{align} &\dot{\mathbf{p}} = \mathbf{v}, && m \dot{\mathbf{v}} = f \mathbf{R}\mathbf{e}_z - m g \mathbf{e}_z,\\ &\dot{\mathbf{R}} = \mathbf{R}\hat{\boldsymbol{\omega}}, && \mathbf{J}\dot{\boldsymbol{\omega}} = \mathbf{J}\boldsymbol{\omega}\times \boldsymbol{\omega}+ \boldsymbol{\tau}_u, \end{align} \] where
- \(\hat{\boldsymbol{\cdot}}\) denotes a skew-symmetric mapping \(\mathbb R^3 \rightarrow SO(3)\)
- \(\mathbf{e}_z = (0,0,1)^\top\) is the unit vector in \(z\) direction
Rotor Placement
How many controllable degrees-of-freedom does a Quadrotor (like the Crazyflie) have?
- If we place motors not in a single plane, we can control orientation while staying in place
- Fully actuated UAV (Rashad et al. 2020)
- downside: less energy-efficient
