Flying Robots
Robotic Systems and Flight Dynamics
Oct 17, 2025
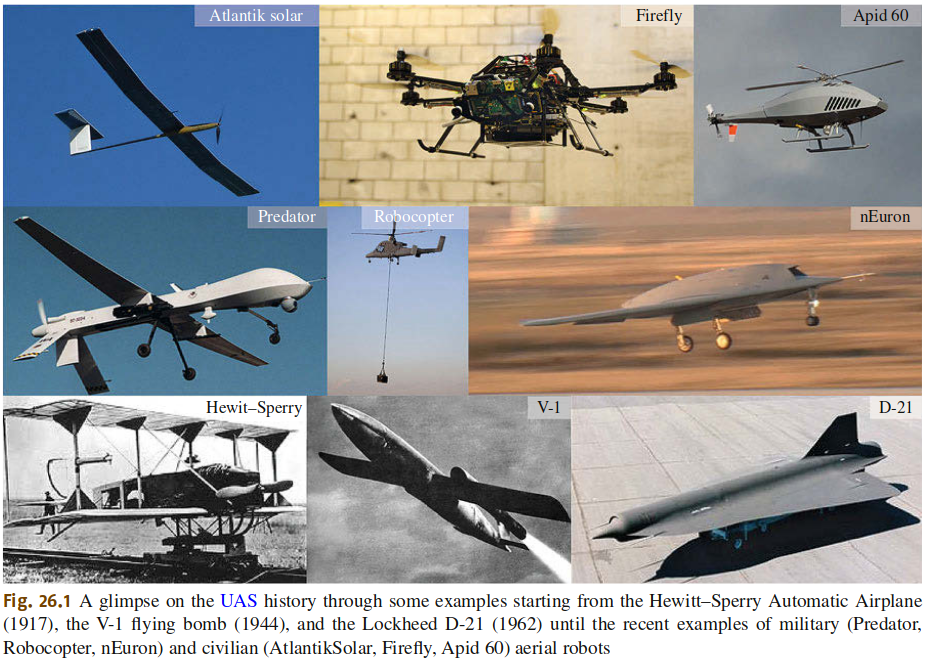
History
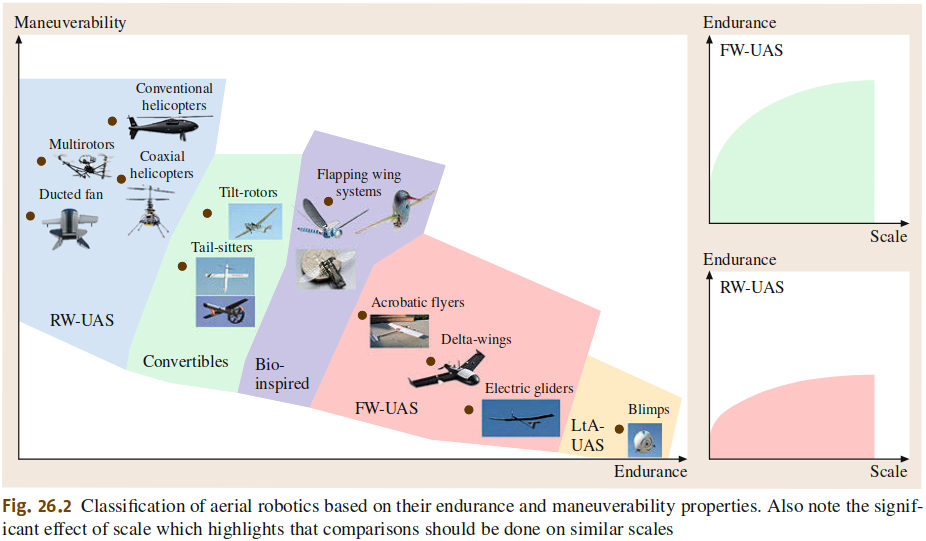
Classification
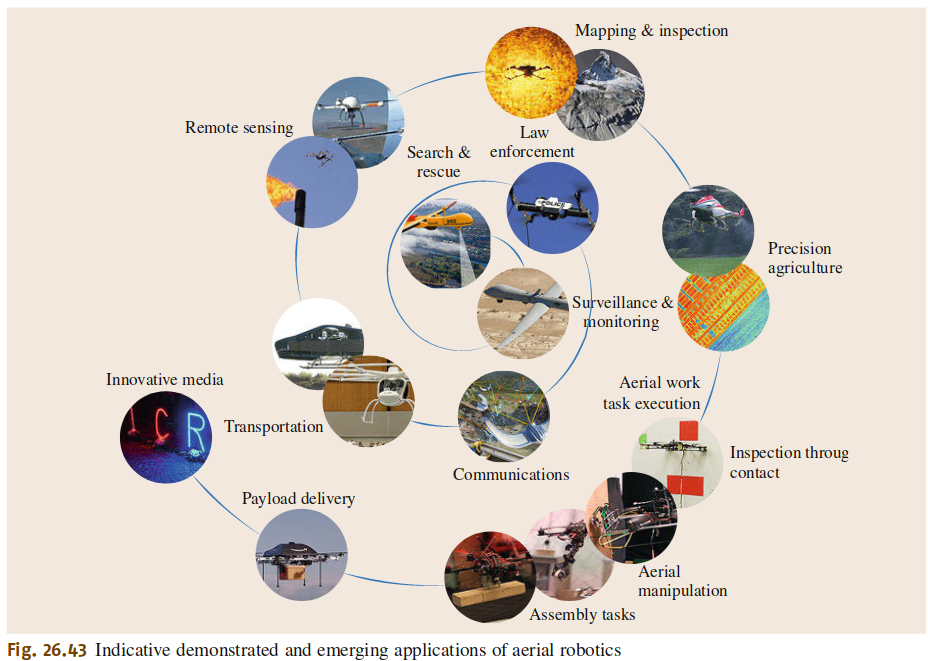
Applications
1D Multirotor
- State: \(\mathbf{x} = (z, \dot z)^\top \in \mathbb R^2\)
- Height \(z\) [m]
- Vertical velocity \(\dot z\) [m/s]
- Action: \(\mathbf{u} = (f_1) \in \mathbb R\)
- Upward thrust \(f_1\) [N]
- Parameters
- Mass \(m\) [kg], Gravity \(g\) [\(m/s^2\)]
- Dynamics: \[ \begin{align} \mathbf{\dot x} = f(\mathbf x, \mathbf u) = \begin{pmatrix} \dot z\\ \frac{f_1}{m} - g \end{pmatrix} \end{align} \]

2D Multirotor
- State: \(\mathbf{x} = (x, \dot x, z, \dot z, \theta, \dot \theta)^\top \in \mathbb R^4 \times SO(2) \times \mathbb R\)
- Position \(x\), Height \(z\) [m]
- Velocities \(\dot x\), \(\dot z\) [m/s]
- Rotation around \(x\)-axis \(\theta\) [rad]
- Angular velocity \(\dot \theta\) [rad/s]
- Action: \(\mathbf{u} = (f_1, f_2) \in \mathbb R^2\)
- Thrust left \(f_1\), Thrust right \(f_2\) [N]
- Parameters
- Mass \(m\) [kg], Arm length \(l\) [m], inertia \(\mathbf J_{yy}\) [\(kg\cdot m^2\)], Gravity \(g\) [\(m/s^2\)]

2D Multirotor
- Dynamics:
\[ \begin{align} \mathbf{\dot x} = f(\mathbf x, \mathbf u) = \begin{pmatrix} \dot x\\ \frac{-(f_1 + f_2) \sin \theta}{m}\\ \dot z\\ \frac{(f_1 + f_2) \cos \theta}{m} - g\\ \dot \theta\\ \frac{(f_2 - f_1) l}{\mathbf J_{yy}} \end{pmatrix} \end{align} \]